Introduction
I've been thinking seriously about when humanoids cross from fascinating to practical — not for warehouses or factories, but for the home of a working parent running a real household.
Many of us already have help — a cleaner, a nanny, a gardener. They're not cheap, but they're significantly cheaper than what humanoids will cost at launch. However, a humanoid that's present all the time changes the equation entirely.
It's not constrained to one category of work. It could, in theory, tidy after breakfast, load the dishwasher, water plants, take out trash, fold laundry, clean the porch, and reset the house at the end of the day. That unboundedness is what makes humanoids genuinely interesting — and genuinely hard to evaluate.
I wanted a mental model to move from fascination to practical adoption: what household work is actually worth delegating, what should remain human, and what capabilities a humanoid would need before someone like me would truly invest in one.
The Analysis
I spent a few hours mapping the household work that keeps my family running — not based on where I currently have help, but based on what actually needs to get done and how often. I landed on roughly 58 distinct activities.
I then classified each as primarily physical or primarily mental. A lot of household work looks physical but isn't purely physical — it involves judgment, memory, preference, care, and emotional labor. Caring for kids is the clearest example. Bedtime, playtime, emotional support, even driving them around — these aren't execution tasks. They're about trust, connection, and responsibility. I excluded them.
Of roughly 58 activities, about 28 were primarily physical. Of those, 18 were tasks I could imagine delegating to a humanoid — from kitchen cleanup and laundry to lawn mowing.
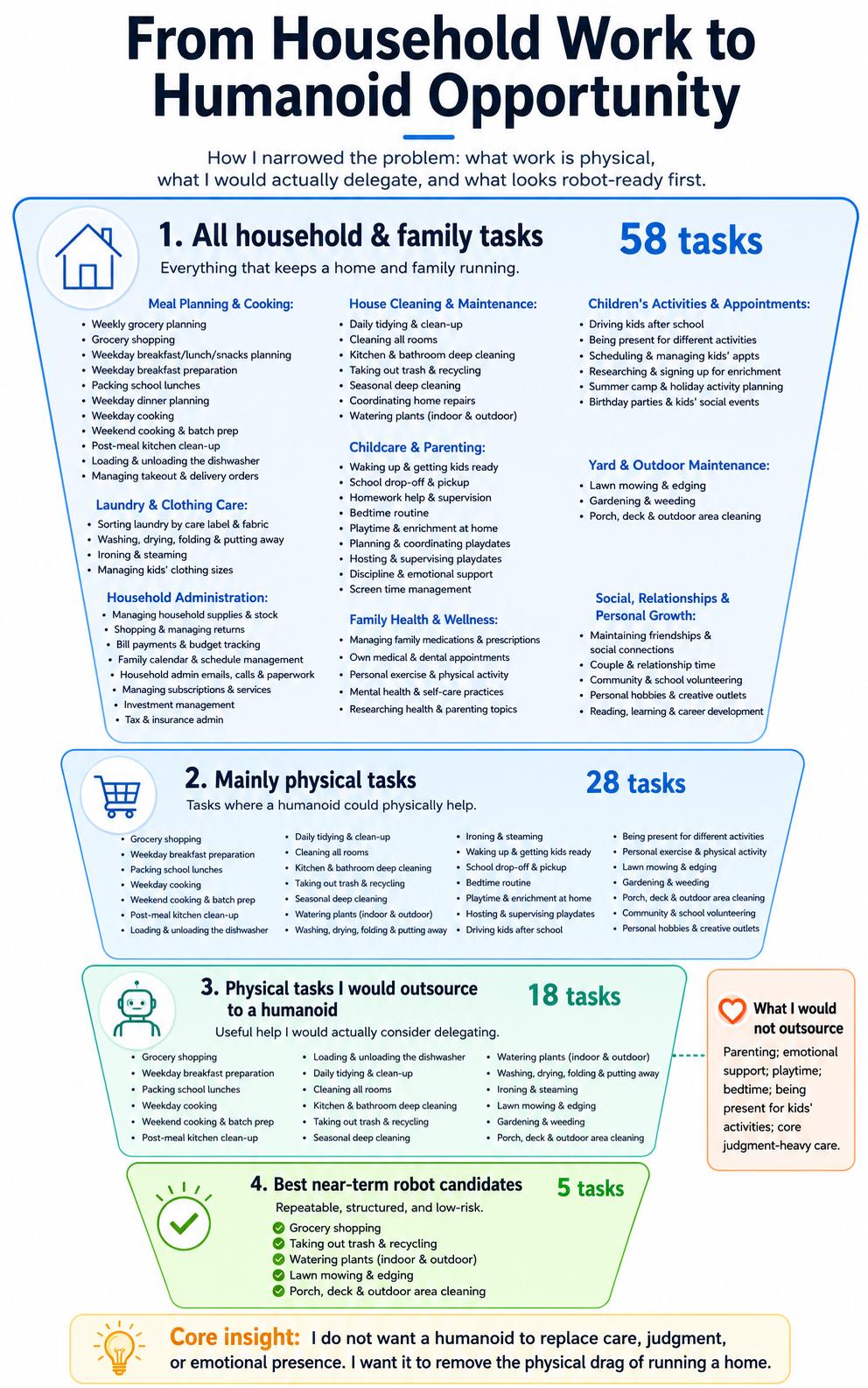
Source file: My Weekly Household & Family Tasks
The Framework
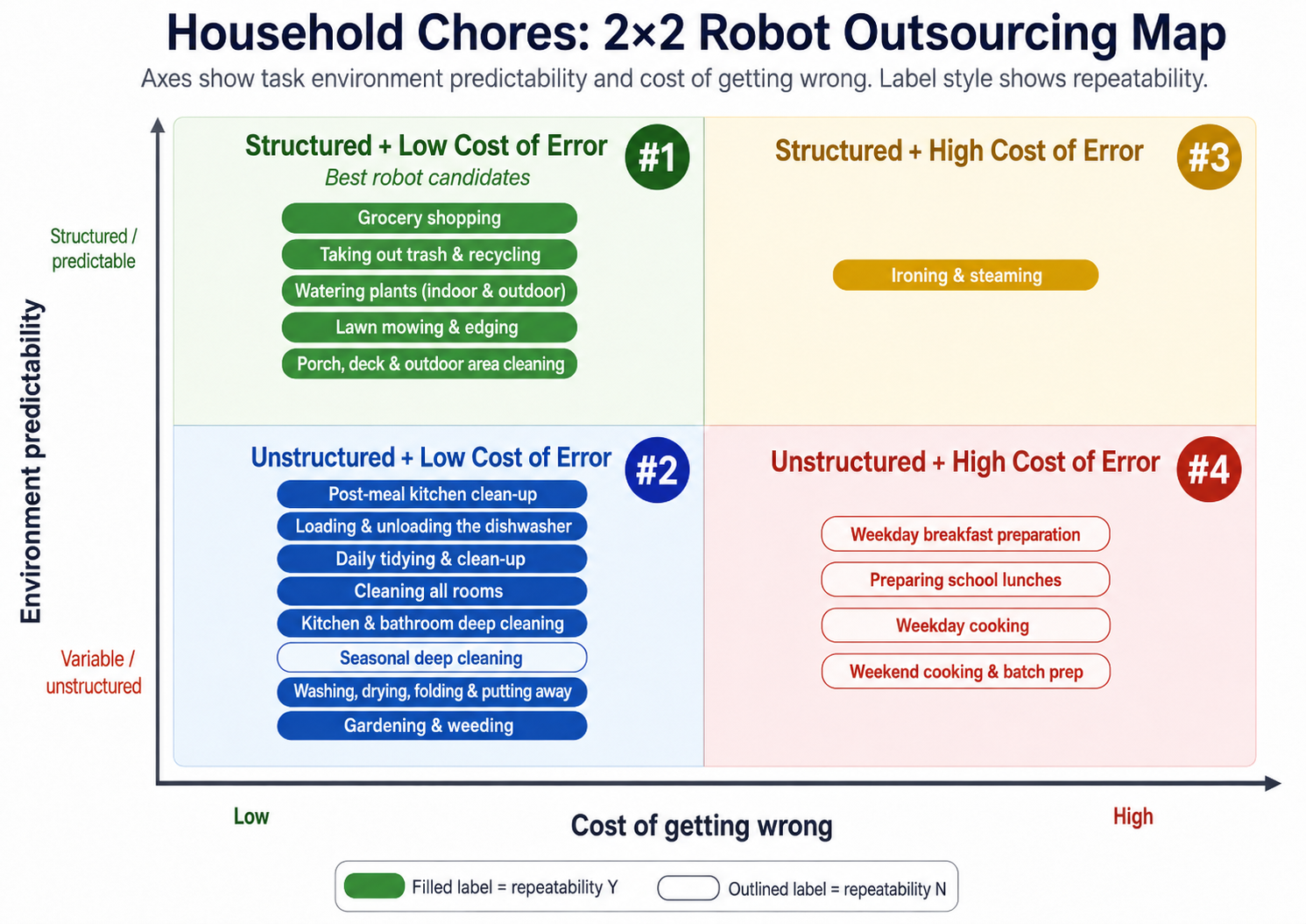
Once I had the list, I needed a way to separate "I would love help with this" from "this is actually ready for humanoid delegation." So I created a simple framework across three criteria, and used it to evaluate each of the 18 chores.
| Criteria | Question | What a "Yes" means |
|---|---|---|
| Repeatability | Can the task be described and learned as a repeatable sequence of steps? | The workflow is automatable. |
| Environment | Can the humanoid expect the world to look mostly the same each time? | The physical environment is structured. |
| Cost | Is the cost of getting it wrong low? | Mistakes are safe, cheap, and recoverable. |
What surprised me
Many household tasks failed on one of these dimensions. Some are repetitive but physically messy. Some happen in structured environments but have a high cost of error. Some are low-risk but change too much every time to be easy for a humanoid.
The best candidates were not always the most annoying tasks. They were the ones where the humanoid could operate in a predictable environment with low-risk mistakes.
Taking out the trash is a clean example. The steps are fixed: lift the bag, tie it, carry it to the bin, return with a new bag, replace the liner. The environment is largely the same every time — same bin, same path, same door. And if something goes wrong, the cost is trivial: a spilled bag, a missed pickup day. A humanoid can learn this task once and execute it reliably for years. It scores well on all three criteria.
Daily tidying is the opposite, and that gap is instructive. To a human, it is one task: pick things up and put them away. To a humanoid, there are many tasks: recognize the object, infer where it belongs, avoid fragile or important items, navigate around people and furniture, and handle exceptions. A toy, a school form, a sock, and a charger are all "clutter" to us, but very different perception and manipulation problems for a humanoid.
Laundry has the same pattern. Washing and drying are relatively structured. But the full workflow — sorting, folding, identifying ownership, and putting clothes away — is highly variable and deeply household-specific.
That was the core insight: a task can be repetitive for a human and still be hard for a humanoid.
Why cooking is still hard
Cooking is the category where the gap between human desire and robotic readiness is most obvious. As a working parent, I would love help with weekday breakfast, school lunches, weeknight dinners, and weekend batch prep. But I'm not getting any of them back from a humanoid anytime soon.
Here's why: cooking isn't a physical task. It's a judgment task that happens to involve physical execution. Preferences, allergies, heat, knives, nutrition, food safety, substitutions, pots, pans, spatulas. The variable surface is enormous.
A humanoid misfolding laundry costs you five minutes. A humanoid misreading an allergy constraint or misjudging a stovetop could cost you far more. That asymmetry matters. It's why almost every cooking task lands in the red quadrant: unstructured environment, unacceptable cost of failure.
This does not mean humanoids will never help with cooking. They probably will. But I would expect the first useful versions to be narrow: chopping, stirring, monitoring, reheating, or operating in more controlled kitchen setups. Full meal ownership is a much bigger leap. We're not close.
And in the meantime, someone still has to make that lunch.
The adoption curve: when does a working parent buy one?
Quadrant 1 tasks are where humanoids will earn their first customers — but not their first real customers.
Taking out trash, watering plants, mowing the lawn, cleaning the porch, running a grocery pickup — these tasks are repeatable, happen in predictable environments, and are cheap to get wrong. A humanoid can learn them once and execute reliably for years. That's a real value proposition, and early adopters will buy on this alone.
But be honest about who that is: a tech enthusiast with disposable income and a high tolerance for a robot that occasionally brings in the wrong recycling bin. Not a working parent of two calculating whether this is worth the cost and a privacy tradeoff.
True adoption — the crossing of the chasm — happens in Quadrant 2.
Post-meal kitchen cleanup, dishwasher loading, daily tidying, room cleaning, deep cleaning, laundry, gardening. This is where the hours actually go. And this is where the bar is higher — not just for dexterity, but for judgment.
The school form on the counter isn't trash. The favorite hoodie doesn't go with the towels. The child's art project isn't clutter. These aren't edge cases — they're everyday. And a humanoid that can't navigate them confidently will be turned off after week two, no matter how good the demo looked.
Homes aren't factories. Factories are designed to be legible to machines — fixed layouts, labeled bins, controlled lighting, consistent objects. Homes are the opposite: personal, dynamic, emotionally loaded, and different in every detail from the house next door. The gap between "can operate in a structured environment" and "can operate in my home" is enormous, and it is the real frontier. Solving it is what separates a useful humanoid from an expensive Roomba.
A working parent won't buy a humanoid when it can mow the lawn. They'll buy one when it knows their home well enough that Sunday nights feel different — even if it still can't cook dinner.
And here's what people underestimate about always-on: it isn't just about capability, it's about availability. You don't worry about your househelp not showing up. You don't negotiate around a two-hour window that happens to land in the middle of your most important meetings. The humanoid doesn't need Tuesdays off. That reliability — unglamorous as it sounds — is its own killer feature.
What I did not model
This was a few hours of structured thinking to develop a personal mental model. There's much more to the full picture: purchase price curves, maintenance costs, subscription models, privacy risks (especially if your humanoid can be remotely operated), novelty cycles, liability, and early adopter dynamics. That's for another time.